监督学习
一、监督学习的第一性原理
1. 本质定义
监督学习的本质问题是:
在给定输入—输出样本对 $(x, y)$ 的条件下, 在某个假设空间 $H$ 中,寻找一个函数 $f$, 使其在未知数据上的期望风险最小。
形式化表达:
$$ \min_{f \in H} ; \mathbb{E}_{(x,y) \sim D}[L(f(x), y)] $$
这一定义揭示了监督学习的三大不变量:
| 维度 | 含义 |
|---|---|
| 假设空间 $H$ | 模型对世界的简化方式 |
| 损失函数 $L$ | 对“错误”的价值判断 |
| 泛化能力 | 对未知世界的适应能力 |
所有监督学习算法,本质上只是对这三者的不同取舍组合。
2. 监督学习的基本问题类型
- **回归问题**:输出为连续值(预测“多少”)
- **分类问题**:输出为离散类别(判断“是什么”)
这不是算法差异,而是输出空间结构的差异。
二、监督学习的核心认知框架
1. 假设空间视角(核心升维)
监督学习算法的根本差异,不在于公式细节,而在于:
它们假设世界“长什么样”
| 假设空间类型 | 核心思想 | 代表模型 |
|---|---|---|
| 线性假设 | 世界可被线性关系近似 | 线性回归、逻辑回归、GLM |
| 距离假设 | 相似样本有相似输出 | KNN |
| 树结构假设 | 世界可由规则切分 | 决策树、随机森林、GBDT |
| 最大间隔假设 | 最安全的边界最可靠 | SVM |
| 概率判别假设 | 输出是条件概率 | Softmax、Logistic |
| 时间依赖假设 | 当前依赖历史 | AR / ARMA / ARIMA |
2. 学习原则(跨模型不变量)
所有模型都遵循以下原则:
- **经验风险最小化**:拟合已知数据
- **结构风险控制**:防止过拟合(正则化、剪枝)
- **偏差—方差权衡**:简单 vs 表达能力
三、线性世界观:线性模型家族
1. 线性回归:可解释性的极致
核心假设:
输出是输入特征的线性加权组合
$$ f(\mathbf{x}) = \mathbf{w}^T \mathbf{x} + b $$
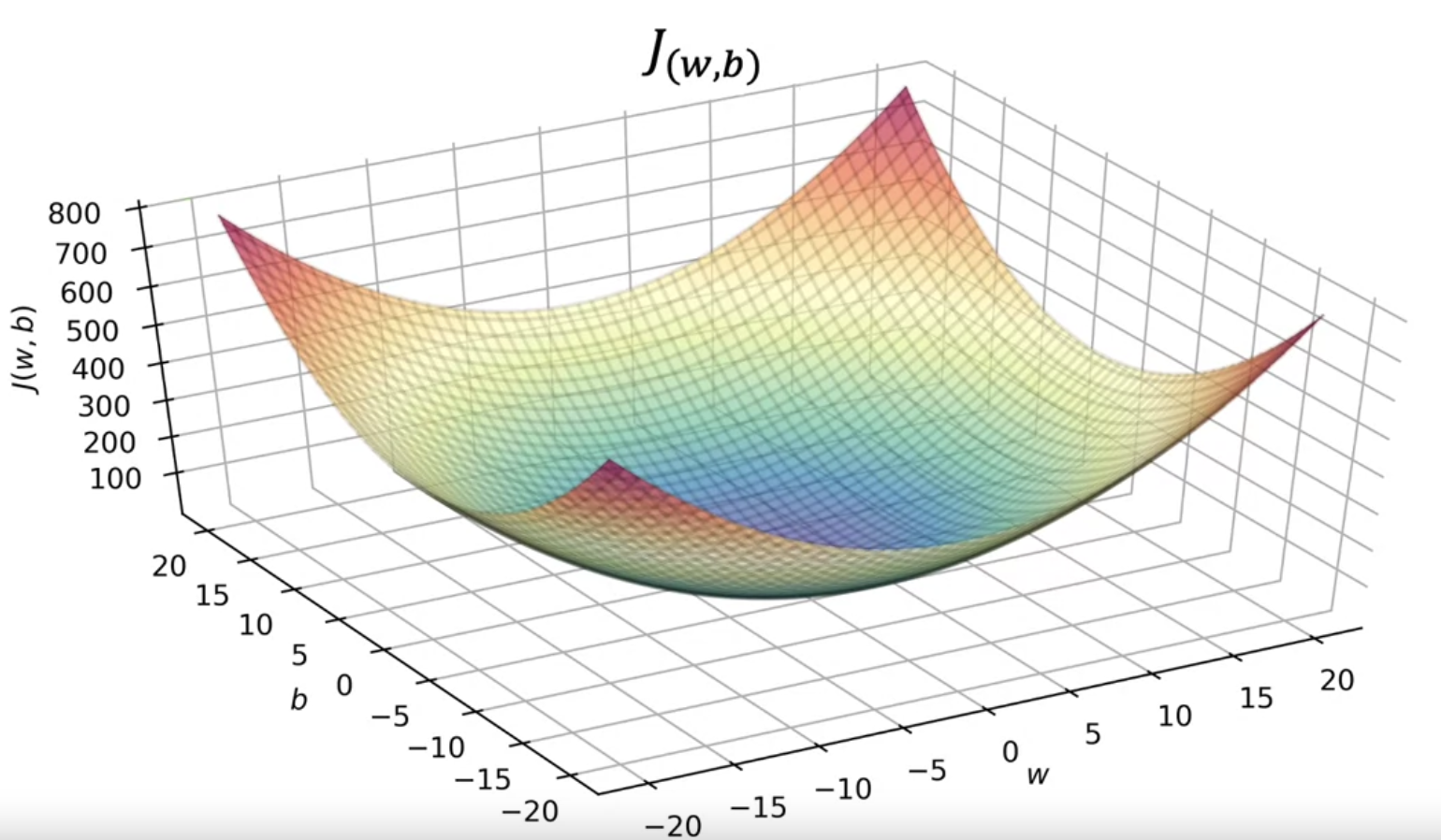
学习目标:最小化平方误差
$$ J(w,b) = \frac{1}{2m}\sum_{i=1}^m (f(x^{(i)}) - y^{(i)})^2 $$
哲学含义:
- 世界是连续、可分解、可解释的
- 是工业界长期使用的“基准理性模型”
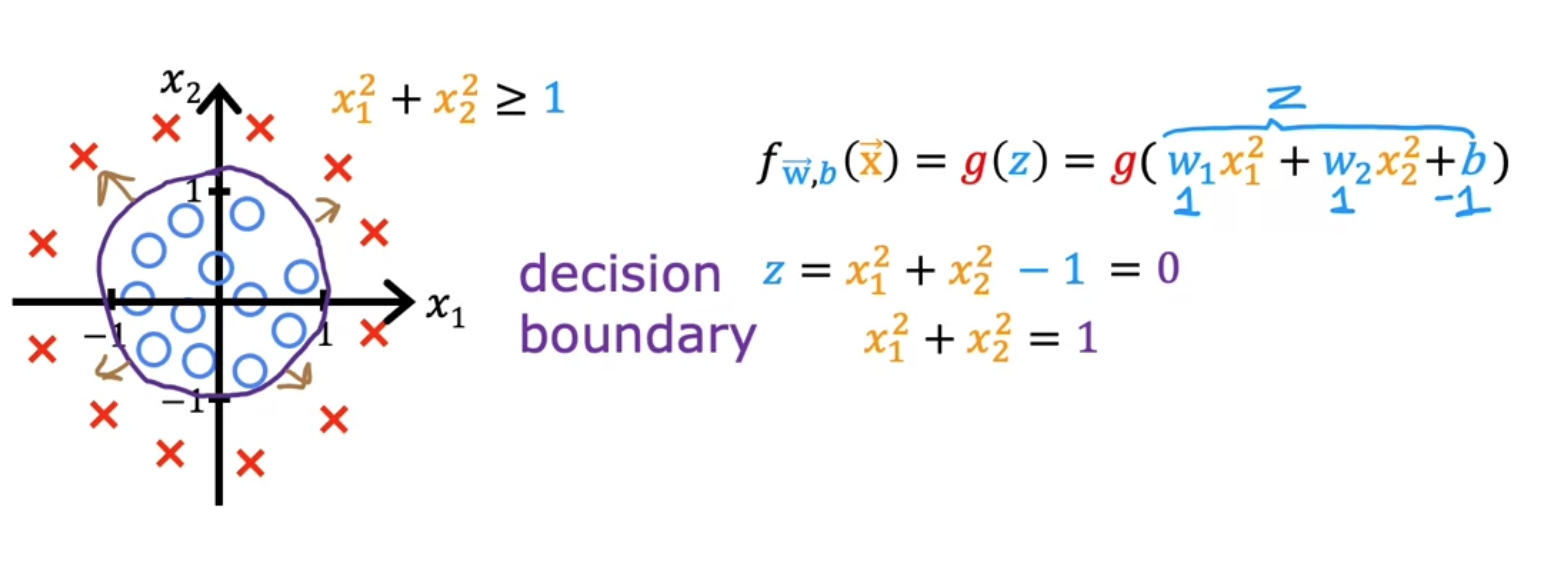
2. 多项式回归:线性形式下的非线性表达
本质不是“更复杂模型”,而是:
通过特征映射扩展假设空间
线性模型 + 非线性特征 = 表达能力提升
3. 广义线性模型(GLM)
核心突破:
- 放松“正态分布 + 恒等映射”的限制
统一形式:
$$ y = g^{-1}(\mathbf{w}^T\mathbf{x} + b) $$
- $g$:联系函数
- $g^{-1}$:激活函数
GLM 是 Logistic、Poisson 回归的理论母体。
4. 广义可加模型(GAM)
思想升级:
保留可解释性,引入受控非线性
$$ y_i = \beta_0 + f_1(x_{i1}) + \cdots + f_p(x_{ip}) $$
是“线性理性”向“复杂现实”的一次温和妥协。
四、概率判别世界观
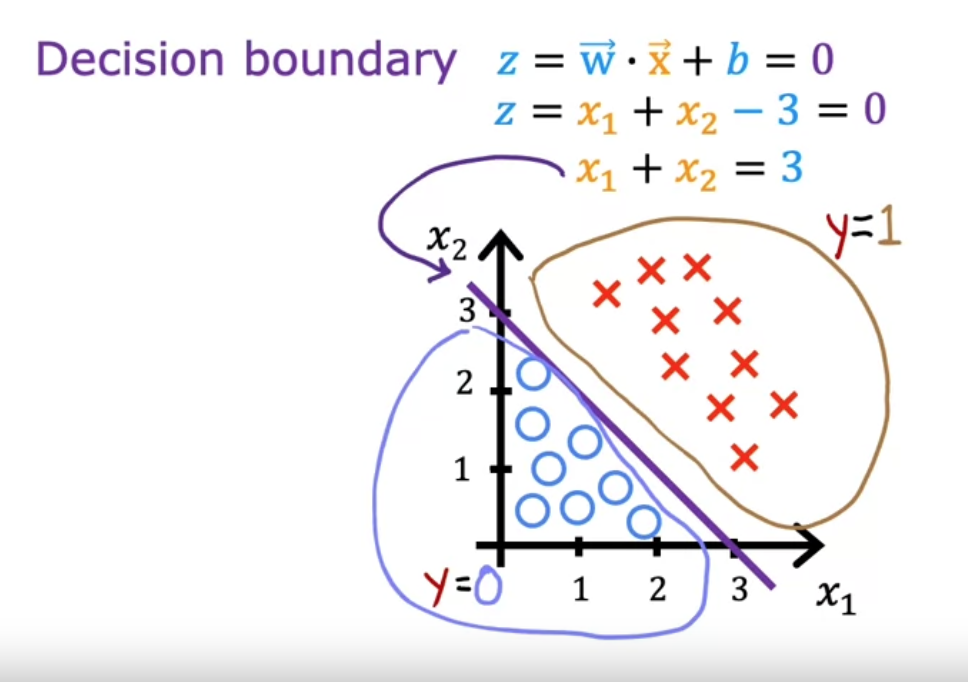
1. 逻辑回归:概率化的线性分类
通过 Sigmoid 将线性输出映射为概率:
$$ f(\mathbf{x}) = \frac{1}{1+e^{-(\mathbf{w}^T\mathbf{x}+b)}} $$
决策边界由 $\mathbf{w}^T\mathbf{x}+b=0$ 定义。
损失函数来源:最大似然估计(交叉熵)
2. Softmax 回归:多分类的自然推广
输出的是条件概率分布:
$$ P(y=k|\mathbf{x}) = \frac{e^{z_k}}{\sum_i e^{z_i}} $$
Softmax 揭示了:
分类不是“判断”,而是“概率分配”。
五、最大间隔世界观:支持向量机
1. SVM 的核心思想
在所有可分边界中,选择最安全的那一条
即:最大化分类间隔。
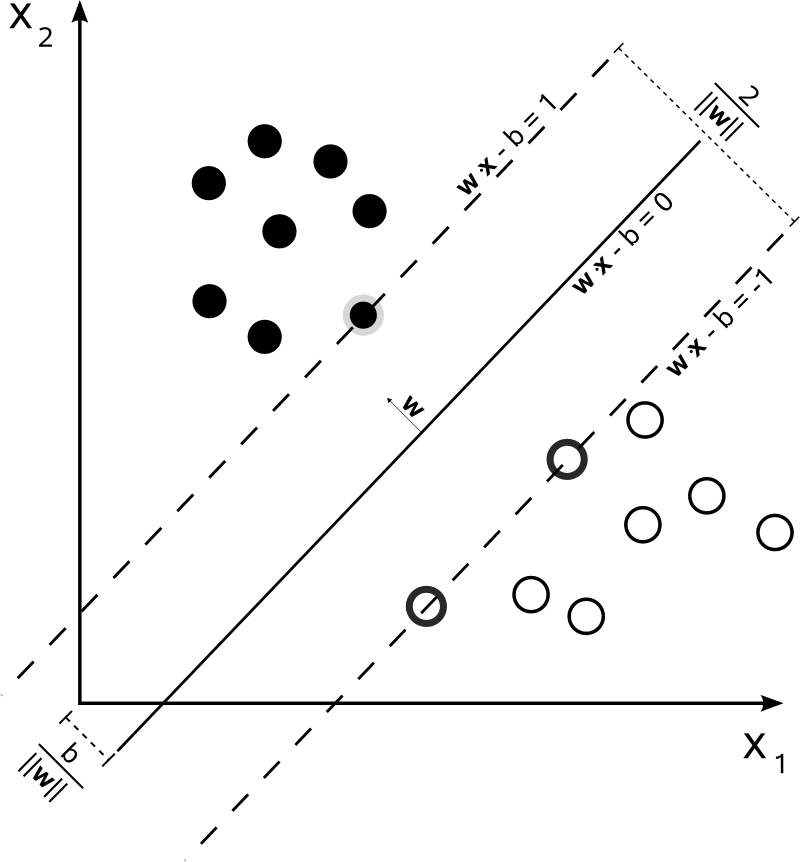
- 硬间隔:理想世界
- 软间隔:现实世界的容错机制
2. 核技巧:隐式特征映射
$$ k(\mathbf{x}, \mathbf{x}') = \phi(\mathbf{x})^T \phi(\mathbf{x}') $$
本质:
- 不显式升维
- 直接计算高维内积
这是计算理性对表达能力的折中。
六、规则切分世界观:树模型家族
1. 决策树的本质
用一组 if-else 规则逼近真实函数

核心问题:
- 如何选择划分?
- 何时停止?
2. 不纯度度量
| 指标 | 本质 |
|---|---|
| 熵 | 不确定性 |
| 信息增益 | 不确定性减少 |
| 基尼系数 | 随机不一致概率 |
3. 决策树算法谱系
熵 → ID3
熵 / 属性熵 → C4.5
基尼 / 二叉划分 → CART
4. 剪枝:结构风险控制
- 预剪枝:生长时约束
- 后剪枝:整体简化
本质目标一致:
用更简单的树,换取更强的泛化能力
七、集成思想:从单模型到系统理性
1. 随机森林:去相关化的并行集成
- 数据随机化(Bootstrap)
- 特征随机化
哲学本质:
多个“有偏但不相关”的模型胜过一个完美模型
2. 极端随机森林
进一步牺牲单棵树质量,换取整体多样性。
3. 梯度提升树(GBDT)
串行纠错:每一棵树都在修正过去的错误
这是函数空间上的梯度下降。
八、距离世界观:KNN
核心假设:
世界是连续的,相近即相似
- 无训练过程
- 计算负担在预测阶段
权衡核心:
- 小 $k$:低偏差,高方差
- 大 $k$:高偏差,低方差
九、时间依赖世界观
时间序列模型的特殊性
- 打破 IID 假设
- 显式建模历史依赖
| 模型 | 核心思想 |
|---|---|
| AR | 历史值决定现在 |
| MA | 历史噪声影响现在 |
| ARMA | 二者结合 |
| ARIMA | 差分平稳化 |
十、监督学习的演进与选型方法论
1. 模型演进路径
线性模型
→ 决策树
→ 随机森林
→ GBDT
→ 深度学习(预留)
2. 模型选择的四个核心约束
- 数据规模
- 特征复杂度
- 可解释性要求
- 工程与计算成本
关联内容(自动生成)
- [/数据技术/机器学习.html](/数据技术/机器学习.html) 机器学习是监督学习的上层概念,监督学习是机器学习的重要范式之一,两者在模型优化、泛化能力等方面有密切关系
- [/数据技术/深度学习.html](/数据技术/深度学习.html) 深度学习是监督学习的一种高级形式,体现了监督学习在复杂模型中的应用和发展
- [/数据技术/非监督学习.html](/数据技术/非监督学习.html) 非监督学习与监督学习是机器学习的两大范式,对比理解有助于深入掌握监督学习的特点
- [/数据技术/特征工程.html](/数据技术/特征工程.html) 特征工程是监督学习的重要前置步骤,直接影响监督学习模型的效果和性能
- [/数据技术/推荐系统.html](/数据技术/推荐系统.html) 推荐系统大量使用监督学习算法,如逻辑回归、GBDT等,是监督学习的重要应用领域
- [/数学/线性代数.html](/数学/线性代数.html) 线性代数是监督学习中线性模型的数学基础,特别是矩阵与向量运算在数据建模中的应用
- [/数学/概率论与数理统计.html](/数学/概率论与数理统计.html) 概率论为监督学习中的贝叶斯方法、最大似然估计等提供理论基础
- [/数据技术/数据分析.html](/数据技术/数据分析.html) 数据分析与监督学习密切相关,监督学习往往作为数据分析的高级手段用于预测和分类任务